
1. ROS 基本概念:
本教程的示例代码功能包可在github下载。有些章节提供了包含若干功能包的综合软件包(meta-packages)。
Python和C++同为ROS软件框架的主要编程语言,本课程采用Python。虽不要求用户具有很高的Python编程技巧,但用户最好能够读懂基本的Python程序。同时具有使用Linux操作系统的基本能力。如果您这二个方面略有困难,建议课后花费几个小时补强即可。
例如,如果您没有使用过Python编程,可用领英学习中大约2个小时视频教程,即可基本掌握Python基本编程方法:
英文版本:https://www.linkedin.com/learning/learning-python-2/
中文版本:https://www.linkedin.com/learning/learning-python-the-basics/2315461?u=42408908
1.3. ROS应用 - 一个智能手臂抓取实例
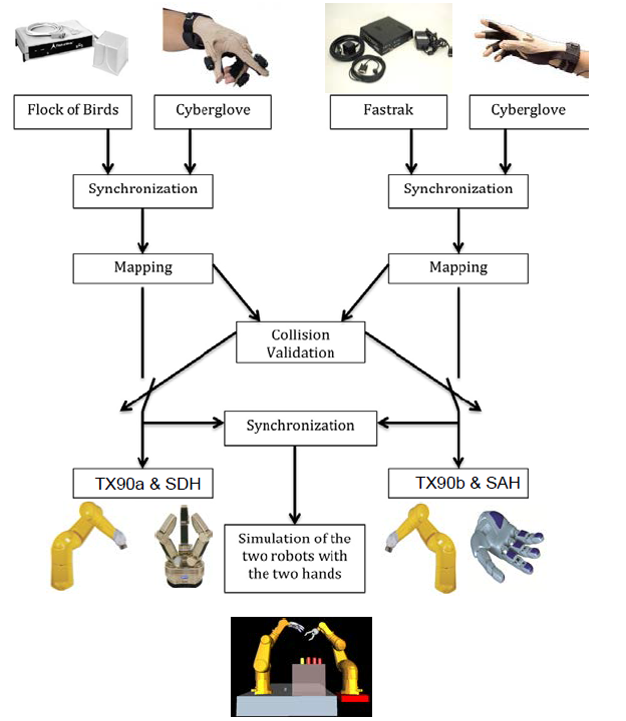
ROS在工业界具有广泛的应用,已成为智能机器人的实际工业标准。下面是一个智能机械手实例,此设备机械部分包括一个机械臂和机械手掌,由装备了肌电传感器和手臂位姿传感器的可穿戴手套进行遥控。
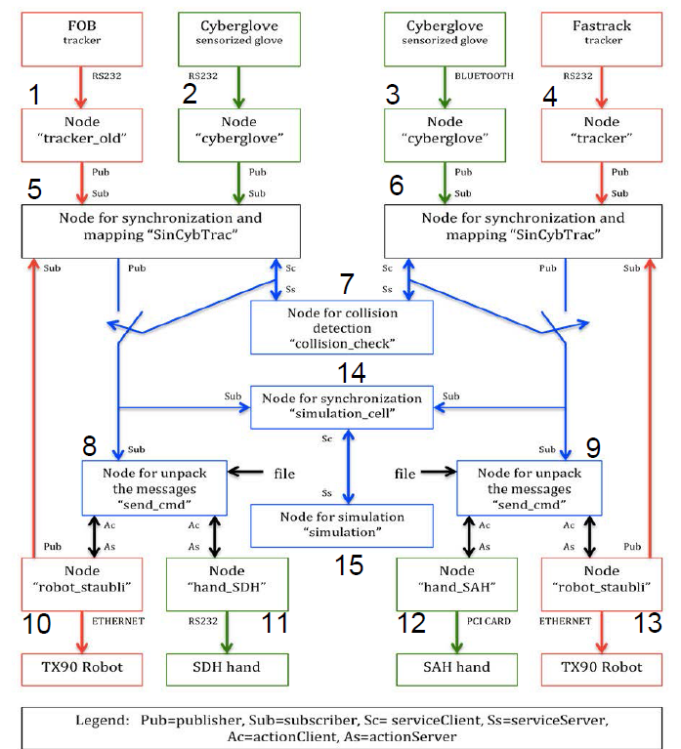
- 图中,节点 #1 至 #4 采用ROS话题发布手套肌电及位姿数据,节点 #5 和 #6 接收此数据。
- 节点 #5 和 #6 进行映射计算,并通过服务(Services)向节点 #7 (碰撞检测节点) 发送是否发生碰撞的询问信息。
- 当无碰撞发生时,节点 #5 和 #6 通过话题发布无碰撞配置数据, 节点#8 和 #9 接收配置数据。
- 节点 #8 和 #9 采用行动数据类型(Actions)发送机械手臂运动命令至节点 #10 到 #13 (这几个节点控制机械手的运动) 。
可下载观看ROS节点控制机械臂视频:https://github.com/Zhijun2/Gallery/blob/master/teleop_robot_hand.webm
| Visitor Counter: | |||||||
 | |  |  |  | | ||